
CSD5-02BX1 сервопривод Б/у 85% внешний вид нового Бесплатно Доставка - купить по
12600

Сохраните в закладки:



*История изменения цены! Указанная стоимость возможно, уже изменилось. Проверить текущую цену - >
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-21-2026 | 1243.88 руб. | 1268.61 руб. | 1255.5 руб. |
| Jan-21-2026 | 1008.58 руб. | 1028.28 руб. | 1018 руб. |
| Dec-21-2025 | 1224.84 руб. | 1248.59 руб. | 1236 руб. |
| Nov-21-2025 | 1214.99 руб. | 1238.86 руб. | 1226 руб. |
| Oct-21-2025 | 969.35 руб. | 988.4 руб. | 978.5 руб. |
| Sep-21-2025 | 1194.67 руб. | 1218.8 руб. | 1206 руб. |
| Aug-21-2025 | 1185.78 руб. | 1209.10 руб. | 1197 руб. |
| Jul-21-2025 | 1175.10 руб. | 1199.27 руб. | 1187 руб. |
Новые товары
Характеристики
Описание товара
Особенности:
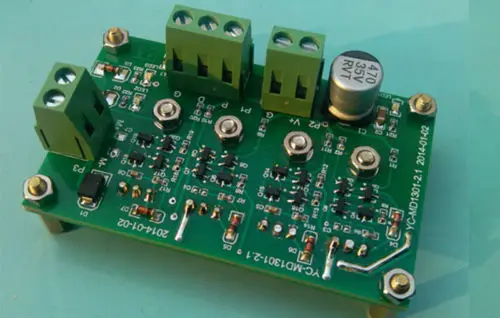
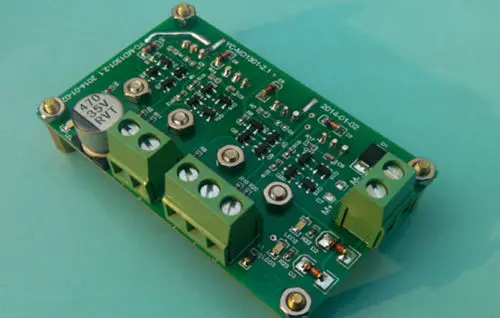
10А модуль драйвера двигателя постоянного тока, с использованием промышленного класса питания MOSFET, контроль скорости вентилятора (доступен полный ШИМ), реверсивный переключатель, функция аварийного тормоза, непрерывный рабочий ток до 10А.
С помощью импортированного MOSFET мощностью 55A, 20 миллиом на сопротивление, без теплоотвода;
Н-мостовая конструкция цепи водителя, встроенная схема управления мертвой временем, более длительный срок службы;
Основные параметры:
Название модуля: 10А одноканальный модуль драйвера двигателя постоянного тока
Режимы работы: Одноместный h-мост
Ключевые компоненты: 55A M0SFET трубки
Напряжение привода: 5 ~ 35 В постоянного тока
Уровень логического управления: Высокий> 2,5 в; Низкий <0,5 В
Управляющий ток: 10A
Рабочая температура:-40 ~ 85
Номинальная мощность: 350 Вт
Размеры: 44*71*16 мм
Вес: 50 г
Особенности:
1. Использование промышленной мощности MOSFET трубки, непрерывный ток до 10А, Максимальный мгновенный пиковый ток до 20А, низкое рассеивание тепла, без теплоотвода.
2. Просто положите w работу для источника питания постоянного тока, цепи управления без дополнительного источника питания.
3. Экономия контроль над ресурсами, это доставит Вам товары в течение 2-way MCU I/O управлять сигналами, вы можете достичь контроль скорости вентилятора, реверсивный переключатель, экстренное торможение функции.
4. Совместим с Микроконтроллерами 3 В и 5 В.
5. Выходная мощность мотора имеет двунаправленную защитную трубу для телевизоров, мотор может быстро сливать от вызванного тока, защиты и управления устройствами.
6. Применение: умные автомобили, роботы, искатель, Промышленный контроль и т. д.
Порты и разъёмы Описание:
P1-логический контрольный Сигнал входных сигналов
P контрольный сигнал P входной терминал;
D контрольный сигнал D входной терминал;
G исходный уровень сигнала (такой же, как и мощность);
P2-источник питания привода (электропитания) вход
V + Положительный диапазон поставки: 5-35VDC;
G Мощность заземления (с заземлением сигнала);
P3 полный привод выход
M + положительные боковые выходы драйвера, подключите двигатель постоянного тока M +;
M-отрицательные боковые выходы драйвера, подключите двигатель постоянного тока M-;
Двигатель постоянного тока Модуль драйвера Управление Материнскую плату в таблице:

Применение пример-1 шт.:
MCU С ШИМ Двигатель постоянного тока Управление скоростью, Задним ходом Переключатель И Функция тормоза, Как показано ниже:

Примечание: Если IO и P, D соединение не является сильным внутренним нагрузочный резистор, необходимо добавить внешний нагрузочный резистор 10 K, такой как микроконтроллер 89C51/52 серии микроконтроллеров
ICOM Примечания:
1. питание системы при инициализации, рекомендуется с P, D подключенным I/O установить на высокий (Vh), а именно P-> Vh (высокий); d-> Vh (высокий); двигатель в состоянии тормоза.
2. мотор переносится для запуска, мы рекомендуем использовать команду: P-> PWM; Двигатель начинается вперед, вперед процесс, регулируя рабочий цикл PWM (Низкое время и высокий коэффициент времени) для изменения скорости двигателя в реальном времени. Примечание: PWM ширина импульса или менее 30us.
3. двигатель is-> обратный переключатель, вы должны сначала остановить тормоз двигателя, который использует инструкции, P-> Vh (высокий); D-> Vh (высокий); тормоз остановит двигатель, затем 100 мс задержка так, затем выполните обратную команду запуска D-> PWM; Мотор стал обратный, Обратный Ход скорости двигателя можно отрегулировать с помощью PWM duty cycle позволяет прыгать (Низкое время и высокое соотношение времени). Примечание: ШИМ импульса не менее 30us.
4. мотор назад-> вперед переключение, вы должны сначала остановить Моторный тормоз, который, P-> Vh (высокий); D-> Vh (высокий); тормоз остановит двигатель, затем задержка составляет около 10 мс, затем запускается вперед команда запуска P-> PWM; Мотор начинает двигаться вперед.
5. аварийная остановка двигателя (торможение), выполните комбинацию инструкции: P-> Vh (высокий);-; нет других инструкций между двумя инструкциями после того, как заказ не может быть отменен, и D> Vh (высокий).
Применение Пример 2:
Кнопка выполнена простым двигателем постоянного тока Реверсивный переключатель и функция тормоза, как показано ниже:

Есть ли гимнастика Описание продукта::
K1 Кнопка запуска Для Мотор переносится, K2 Для Замена двигателя Кнопка запуска, K3 Тормоза Для Мотор вперед Кнопки.
K1 Кнопка НажимаетсяМотор Работает под управлением Вперед В настоящее время, Подъемник Кнопки K1, Мотор побережья Для того чтобы остановить Бег.
K2 Кнопка НажимаетсяМотор Реверс Run, В этот раз Подъемник Кнопка K2, Мотор побережья Для того чтобы остановить Бег.
В тех случаях, когда двигатель Находится в Вперед или назад, Пресс K3 Прямой Кнопка, Мотор Торможении Немедленно Единый Бег.
Нагрузки Тест:
1. ПодключенияДля того, чтобы 2,4 Ом Силовые резисторы, Блок питания 24VDC, PWM Управление Сигнал Частота 20 кГц 90% Рабочий циклВыходной ток О 8.83A, Как показано ниже:

2 . ПодключенияДля того, чтобы 2,4 Ом Силовые резисторы, Блок питания 24VDC, PWM Управление Сигнал Частота 20 кГц Рабочий цикл 100%Выходной ток О 10.22A, Как показано ниже:

Программирование Примеры:
Соединение С микроконтроллером (MCU) STC15F2K60S2 Двигатель постоянного тока привод Плата управления Модуль Двигатель постоянного тока Задним ходом, Торможения Управление; Электрический Схема подключения, Следующим образом:

/ ************* Функция Описание ********************************** Цвета с воздушными шарами
Это Программа демонстрирует Использование SCM STC15F2K60S2 Двигатель постоянного тока привод Плата управления Соединение Модуль Постоянного тока
Реверсивный Моторы, Стоп-сигнал Управление;
Со стороны Делать 16 Таймер 0 Автоматическая перезарядкаПрерываний, IN11 И IN12 Выход От ШИМ.
Достигнуты Через внешний Прерывания 0 Ключи KEY1, KEY2 Коллекция И ответ;
PWM Может быть каких-либо Диапазон. Тем не менее, из-за Переустанавливать Программное обеспечение Могут потребовать немного больше Время, таким образом, Минимум PWM рабочий цикл
32 из полиэстера и хлопка Цикл, Максимальная (Цикл -32 T)/ ЦиклТ -Часы Цикла.
PWM Частота Взаимной периода. В случае, если Срок 2400 Для того, чтобы использовать 24 МГц Частота, В PWM Частота 10 кГц.
************************************************** ******************** /
# Включает в себя <reg52.h>
# DefineMAIN_Fosc24000000UL/ Определение Контрольные часы
# DefinePWM_DUTY2400/ Определение PWM Цикл, Стоимость -Кол-во Тактов, Использование 24 МГц Частота, Величина 2400ШИМ Частота 10 кГц.
# DefinePWM_HIGH_MIN32/ Предел Минимальный рабочий цикл В вывод pwm. Не изменяйте Пользователю.
# DefinePWM_HIGH_MAX (PWM_DUTY-PWM_HIGH_MIN)/ Предел Максимального срока службы В вывод pwm. Не изменяйте Пользователю.
Typedefunsigned charu8;
Typedefunsigned intu16;
Typedefunsigned longu32;
Sfr P3M1 = 0xB1;/P3M1. n, P3M0. n = 00 ---> Стандарт, 01 ---> push-pull
Sfr P3M0 = 0xB2;/= 10 ---> чистый вход, 11 ---> открытый дренаж
Sfrauxr = 0x8E;
Sfr INT_CLKO = 0x8F;
/SbitP_PWM = P3 ^ 5/ Определите PWM Выход pin-код.
/SbitP_PWM = P1 ^ 4/ Определите PWM Выход pin-код. STC15W204S
Сбит IN11 = P3 ^ 3/ Мотор Интерфейс управления -P
Сбит IN12 = P3 ^ 4/ Мотор Интерфейс управления -- D
Сбит звуковой сигнал = P3 ^ 7;/ Зуммер
Sbit KEY1 = P2 ^ 0;/ Кнопка-1 шт., Нажмите Мотор переносится, Затем нажмите кнопку Мотор остановлен, Затем нажмите кнопку Мотор переносится
Sbit KEY2 = P2 ^ 1;/ Кнопка 2Нажмите Замена двигателя, Затем нажмите кнопку Мотор остановлен, Затем нажмите кнопку Замена двигателя
U16pwm; Переменная @ PWM Выход Высокое Определение Время. Инструкция по эксплуатации PWM Переменные.
U16PWM_high, PWM_low;/ Промежуточный переменных, Пользователи Не изменяйте.
U8T0Countor;/T0 Рассчитывать переменной
U8 M0Run;/ Есть ли гимнастика Состояние Переменная Мотор 0 0 --- Stop, Вперед 1 --- 2 --- Разворот,
Void delay_ms (неподписанный char ms);
Voidloadpwm (u16 i);
/ ******************** Основные функции ************************** /
Void основной (void)
{
/P_PWM = 0;
IN11 = 0;
IN12 = 0;
Звуковой сигнал = 0;
P3M1 & = ~ (1 <3); P3M0 | = (1 <3);/P3.3 IN11 Установлен Двухтактный Выход P3M1 & = ~ (1 <4); P3M0 | = (1 < 4)/P3.4 IN12 Установлен Двухтактный выход
P3M1 & = ~ (1 <7); P3M0 | = (1 <7)/P3.4 IN12 Установлен Двухтактный выход
TR0 = 0;/ Остановка пересчета
ET0 = 1;/ Разрешено Прерывания
PT0 = 1/ Высокий приоритет прерывания
TMOD & = ~ 0x03;/ Режим, 0:16-Бит авто-Перезагрузить
AUXR | = 0x80;/1 T
TMOD & = ~ 0x04;/ Сроки
/INT_CLKO | = 0x01;/T0Clock Выход часы
TH0 = 0;
TL0 = 0;
TR0 = 1;/ Начинается Бег
INT0 = 1/ Позвольте INT0 Прерывания
IT0 = 1;/ Набор INT0 Прерывания типа 1 --- 0 --- Только в том случае, Падения края Поднимать и падать
EX0 = 1;/ Включить INT0 Прерывания
EA =-1 шт.;
Pwm = (PWM_DUTY * 2 общее количество)/10;/ Для того, чтобы PWM Это Начальное значение, К примеру PWM_DUTY/10 В тех случаях, когда 10% Рабочий цикл; (PWM_DUTY * 2)/10 В тех случаях, когда 20% Рабочий цикл; (PWM_DUTY * 3) / 10:00 Для 30% Рабочий цикл;
LoadPWM (pwm);/ Рассчитать PWM Перезагрузить Соотношение цена/качество
M0Run = 0;/ Набор первоначального Состояние мотор, 0 --- Stop, Вперед 1 --- 2 --- Разворот,
В то время как (1)
{
}
}
@ ================================================ =
@ Функция: Void delay_ms (неподписанный char ms)
@ Описание: Функция задержки.
@ Параметры: MS, Кол-во MS Для того, чтобы Задержка, Здесь Поддерживает только 1 ~ 255 мс Автоматически приспосабливается к В контрольные часы.
@ Возврат: Нет.
@ Версия: VER1.0
@ Срок производства тиража: 2013-4-1
@ Примечания:
@ ================================================ ========================
Void delay_ms (неподписанный char ms)
{
Unsigned int i;
Есть ли {
I = MAIN_Fosc/13000;
Время (-i);
} Время (-МС);
}
/ **************** Рассчитать PWM Перезагрузить По Фаренгейту) ******************* /
Voidloadpwm (u16 i)
{
U16 j;
Если (i> PWM_HIGH_MAX) i = PWM_HIGH_MAX;/ Если записи Данных Больше, чем Максимального срока службы Является Принудительного до максимума Длительным сроком службы.
Если (i <PWM_HIGH_MIN) i = PWM_HIGH_MIN;/ Если записи Меньше, чем Минимальный рабочий цикл Данные Обязательные Для Минимум Длительным сроком службы.
J = 65536UL-PWM_DUTY + i;/ Рассчитать PWM Уделяют мало времени
I = 65536UL-i;/ Рассчитать PWM Настало время
EA = 0;
PWM_high = i;/ Загрузка PWM Настало время
PWM_low = j;/ Загрузка PWM Уделяют мало времени
EA =-1 шт.;
}
/********************* INT0 Прерывания функция ************************ /
Void exint0 () прерывание 0
{
Если (KEY1 = 0)/ Кнопка 1 Пресс
{
Если (M0Run = 0) M0Run = 1;/ В тех случаях, когда двигатель Остановился, Мотор переносится;
Еще M0Run = 0;/ В противном случае Моторный остановок;
} Если (KEY2 = 0)/ Кнопка 1 Пресс
{
Если (M0Run = 0) M0Run = 2;/ В тех случаях, когда двигатель Остановился, Замена двигателя;
Еще M0Run = 0;/ В противном случае Моторный остановок;
}
Звуковой сигнал =-1 шт.;
Delay_ms (20);
Звуковой сигнал = 0;
}
/********************* Timer0 Прерывания функция ************************ /
Void timer0_int (void) прерывание 1
{
Если (M0Run = 0)
{
IN11 =-1 шт.;
IN12 =-1 шт.;
T0Countor = 0;
}
Если (M0Run = 1)
{
T0Countor + +;
Если (T0Countor = 1)
{
IN12 = 0;
TH0 = (u8) (PWM_low> 8);/ В случае, если Выход Высокая -> Низкая, Низкая Загрузка Время.
TL0 = (u8) PWM_low;
}
Если (T0Countor = 2)
{
IN12 = 1; T0Countor = 0;
TH0 = (u8) (PWM_high> 8);/ Выход Если это Низкая -> Высокая, Нагрузки Настало время.
TL0 = (u8) PWM_high;
}
}
Если (M0Run = 2)
{
T0Countor + +;
Если (T0Countor = 1)
{
IN11 = 0;
TH0 = (u8) (PWM_low> 8);/ В случае, если Выход Высокая -> Низкая, Низкая Загрузка Время.
TL0 = (u8) PWM_low;
}
Если (T0Countor = 2)
{
IN11 = 1; T0Countor = 0;
TH0 = (u8) (PWM_high> 8);/ Выход Если это Низкая -> Высокая, Нагрузки Настало время.
TL0 = (u8) PWM_high;
}
}
}
Посылка содержание
100% Фирменная Новинка
1 x10A пик 20A 350 Вт DC мотор драйвер платы модуля h-мост DC MOSFET 5 V-35 V

Продавец отправил футболку быстро, доставка примерно месяц. Товар отслеживался. Футболка соответствует описанию. Маломерит на размер. Не слишком плотная- подойдёт носить... Читать отзыв полностью...

Чехлы моя слабость, всегда выбираю всё лучшее. До этого времени любила однотонные и скромные. Сейчас попробовала с блёстками. Выглядят очень... Читать отзыв полностью...

Дешево и сердито, бюджетные способы украсить комнату Милые картинки в детскую. Хорошо подходит в светлую комнату. Купили девочке-грудничку в подарок)))... Читать отзыв полностью...
Покупал для себя такой нож-бабочку. Нож отличный, исполнен из прочных материалов. Не острый, безопасный. Отлично подойдет для тренировок. То, что... Читать отзыв полностью...

Сумка отличная, качество на высоте. Ручная работа. Несмотря на небольшие размеры, сумка очень вместительная. Фиксируется в закрытом виде плотно. Ручка... Читать отзыв полностью...

Часто покупаю трикотажные комплекты. Подходит для любых размеров, в них очень удобно и комфортно. Люблю особенно бежевые цвета, и этот... Читать отзыв полностью...








Сделала отличное приобретение в виде очень удобных трусов-слипов для повседневного ношения. Это самая подходящая модель на каждый день. Трусики красивые,... Читать отзыв полностью...